参与学生:张昱、徐海洋
指导教师:张美凤、蔡建文
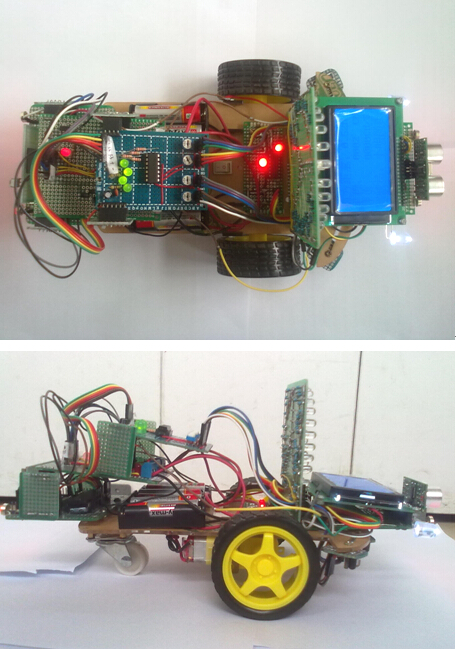
内容介绍:智能小车作为移动式机器人的一个重要分支,随着机器人研究的深入受到越来越多人的关注。它是计算机控制与电子技术的融合,集传感器探测、单片机自动控制、电机调速等于一体,可以说是计算机、传感器、信息、通讯、导航、人工智能及自动化控制等技术的一个综合体。
本项目以智能化全面发展的普及与应用为目的,主要体现多功能小车的智能模式。通过搭建单片机控制模块、红外遥控模块、自动寻迹模块、超声波避障模块、电机驱动模块、测速与里程记录模块、显示模块和变压模块以及软件编程等,
实现如下功能:
(1)通过红外发射与红外接收技术,完成对小车的控制,实现小车的前进、后退、左转、右转和停止;
(2)利用红外对管对路面信息进行探测,实现小车的自动寻迹功能;
(3)应用超声波测距技术,探测前方障碍物,从而实现小车的自动避障功能;
(4)使用槽型红外光电开关和码盘,检测小车的速度和行驶里程;
(5)将前方障碍物距离、小车当前速度、已行驶的里程等信息显示在12864液晶屏幕上。
项目特色与创新:
(1)本项目的软硬件部分采用模块化设计,便于调试、组装;
(2)把红外遥控技术和超声波技术应用于小车的方向控制、测距避障等,更有利于小车的灵活操作和保证较高的检测精度。